(ICCV’25) ViLU: Learning Vision-Language Uncertainties for Failure Prediction
Published in International Conference on Computer Vision, ICCV 2025, 2025
We design a new model that efficiently learns vision-language uncertainties of foundation vision language models. 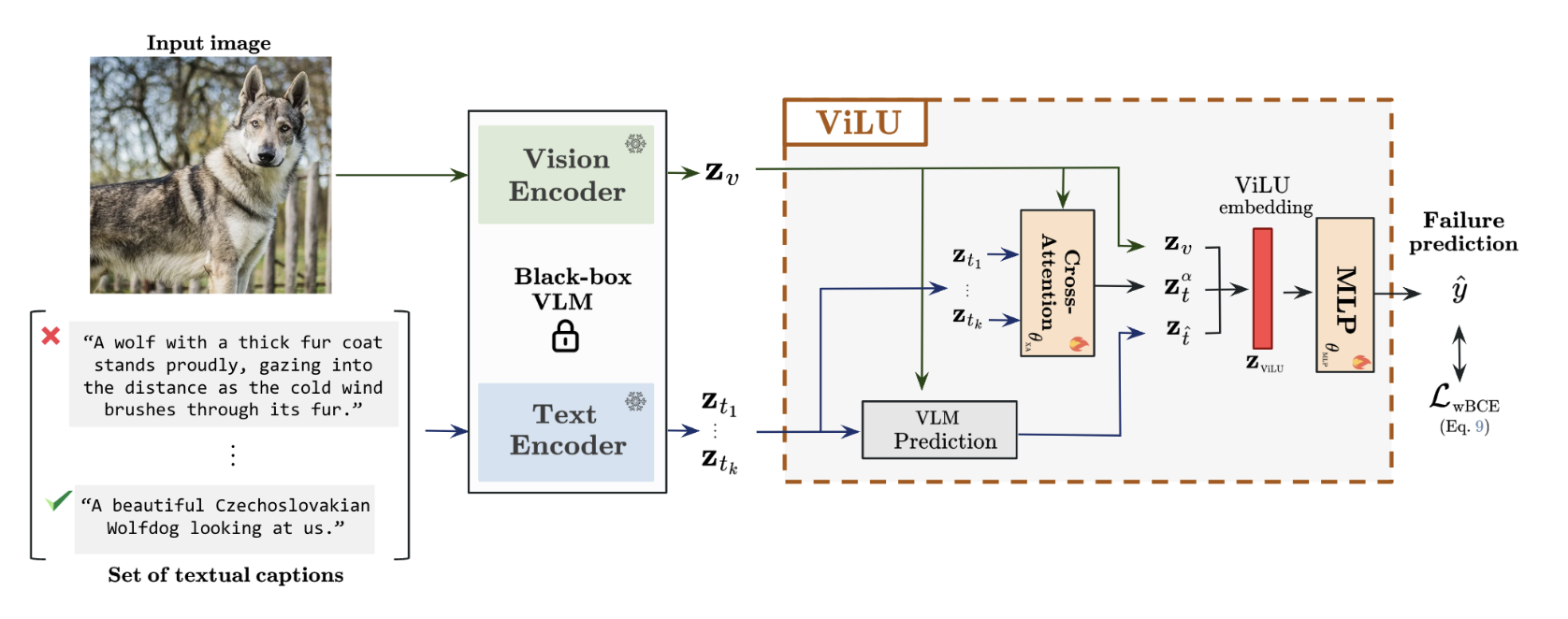
Recommended citation: Lafon M.*, Karmim Y.*, Silva-Rodríguez J., Couairon P., Rambour C., Fournier-S'niehotta R., Ben Ayed I., Dolz J., Thome N. ViLU: Learning Vision-Language Uncertainties for Failure Prediction. ICCV 2025. https://arxiv.org/abs/2409.17986v1 https://arxiv.org/abs/2409.17986